9.3.1 ��ּ��Ŀ��(bi��o)
�������܇��늵����ͽ��|�W(w��ng)���O(sh��)Ӌ(j��)�����ܲ������ڂ��y(t��ng)���������ϵ�y(t��ng)��������?y��n)����@�N�ٶ��£��^(gu��)ȥ�Ľ�(j��ng)�(y��n)���m�á��S���ٶȵ���ߣ����W(w��ng)�����׃��Խ��(l��i)Խ��Ҫ��ֻ�п��]���������|�W(w��ng)����늹��ڃ�(n��i)�ĸ������ϵ�y(t��ng)�O(sh��)�䣬���ܫ@��һ��(g��)�Ќ�(sh��)���õ��O(sh��)Ӌ(j��)������Ӌ(j��)��C(j��)ģ�ͷ�ʽ��ģ�M�@Щ����������õ���Ч�x�����@�ӵĔ�(sh��)�W(xu��)ģ�ͼ����C�����N����(sh��)�����ã�߀�����u(p��ng)����ͬϵ�y(t��ng)������á�
��(d��ng)�B(t��i)ģ�M��Ŀ����Ҫ�_�����������ڽ��|���ϵ��Ƅ�(d��ng)���|�����c�r(sh��)�g���P(gu��n)�����ԣ��Լ��ͽ��|��̧������P(gu��n)ϵ�����@��(g��)�^(gu��)���У����ͬ�r(sh��)��������(g��)���|�c(di��n)������ã����磬���Æι��Ͷ������ʹ��(y��ng)�õ�ģ����Ч��߀ҪӋ(j��)��Ȝy(c��)�����|������������������(sh��)������|�W(w��ng)���\(y��n)��(d��ng) [9.12]�����ֿ��]�������P(gu��n)�ԣ�ģ�ͱ����ģ�M���|�W(w��ng)�O(sh��)����������ԣ�
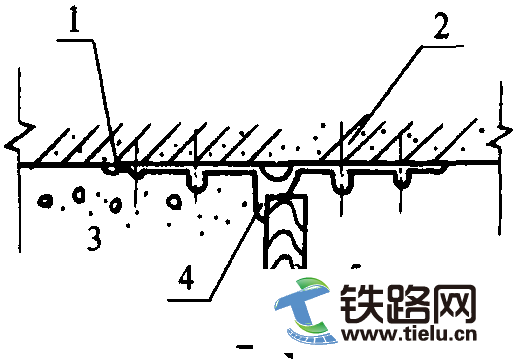
�D9.8 ��̖(h��o)��SBS 81��늹�������(g��)�|(zh��)��ģ��
m���������|(zh��)��; c�����ɏ���ģ��(sh��); d������;FR��Ħ����
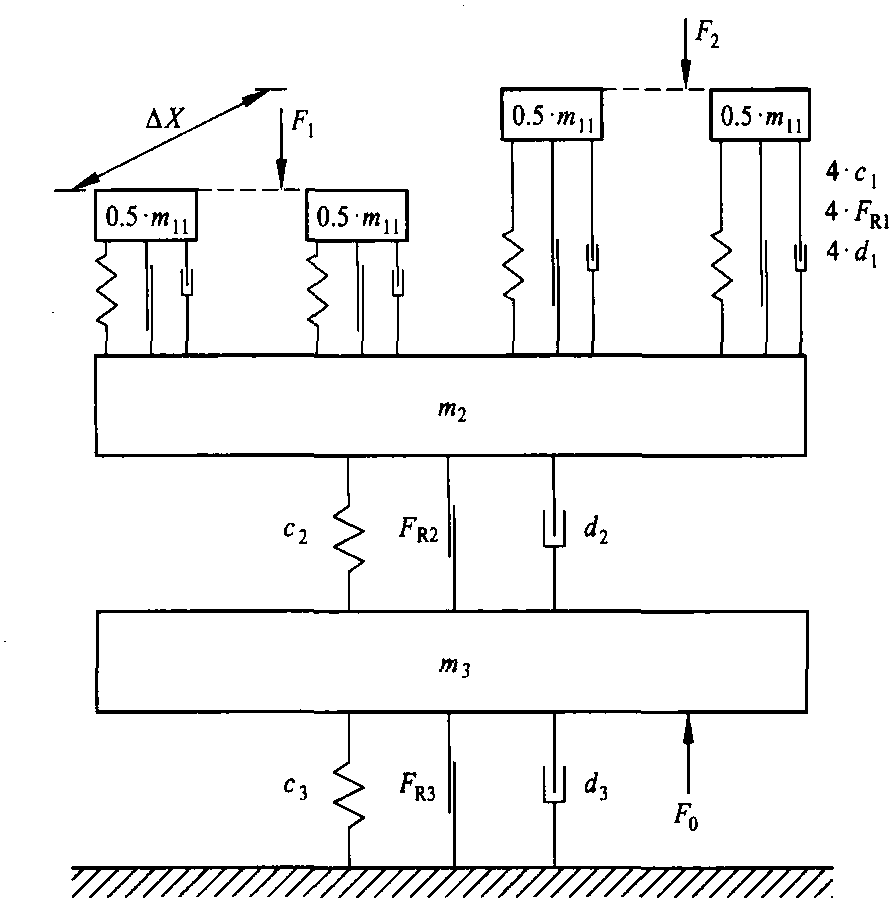
�D9.9 ��늹���6��(g��)�|(zh��)��ģ�K�քe���Џ���
���� (��̖(h��o)ͬ�D9.8)
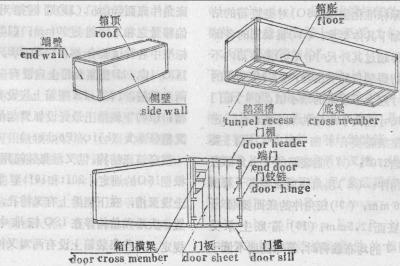
�����N��͵Ľ��|���������������Ե����͵��ң����������IJ������ԺͰ��b�l��;
����ͬ�Ľ��|�W(w��ng)�O(sh��)�䣬���磬���Գ����������o�������������ߵ����g��������;
�����N֧�ֽY(ji��)��(g��u)�Ą�(d��ng)�B(t��i)���ԣ�������λ�ܡ����֧���b�ú�֧��;
�����B�m(x��)�ԣ�������ֶν^�������^���P(gu��n)��(ji��)�����|�W(w��ng)�߶ȵ��½�������λ��̎�Ľ��|�W(w��ng)�b��;
���������^��
��늹��ͻ���ģ��һ��Ҫ���]���»�������(sh��)��
����ͬ��͵���늹��Y(ji��)��(g��u)���������Ե����ԣ��磬�α���늹����p����늹�;
����ͬ��͵Ľ��|Ԫ�����磬�����桢��(g��)���塣
��ϵ�y(t��ng)�ą���(sh��)��(y��ng)���ڸ�׃�������S��(y��u)������(sh��)�����⣬��늹��ͽ��|�W(w��ng)ģ�͵��|(zh��)������ஔ(d��ng)��ӽ����Ա��CӋ(j��)��Y(ji��)���Ĝ�(zh��n)�_��
��늹��ͽ��|�W(w��ng)�O(sh��)���ǃɂ�(g��)��(d��)�����|�c(di��n)�����ʎ����ϵ�ϵ�y(t��ng)���ж���(g��)�������늹��͕�(hu��)�γɶ��c(di��n)�̾��x���x���|���������@�Nģ�ͣ�ͨ�^(gu��)���|�����ͽ��|�c(di��n)��λ�ã����Խ�������ģ��֮�g����ϡ�
9.3.2 ��늹�ϵ�y(t��ng)��ģ��
���|�W(w��ng)�c��늹��Ľ��|�c(di��n)�γ��˃ɂ�(g��)ϵ�y(t��ng)����ϡ��@��Ҫ�����ģ�M���@һ�c(di��n)�����Ժ�����á������Ӌ(j��)����|�����ͽ��|�c(di��n)�Ĵ�ֱ�\(y��n)��(d��ng)���������ϵ�y(t��ng)��ƽ��ģ�ͣ����J(r��n)�������������ڻ����ͬһ�c(di��n)�ϡ����O(sh��)ͨ�^(gu��)�������������c(di��n)�ľ��ԙM���Ƅ�(d��ng)�����Կ��]���|���ęM���Ƅ�(d��ng)�����w���á�
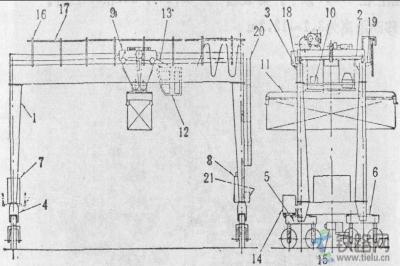
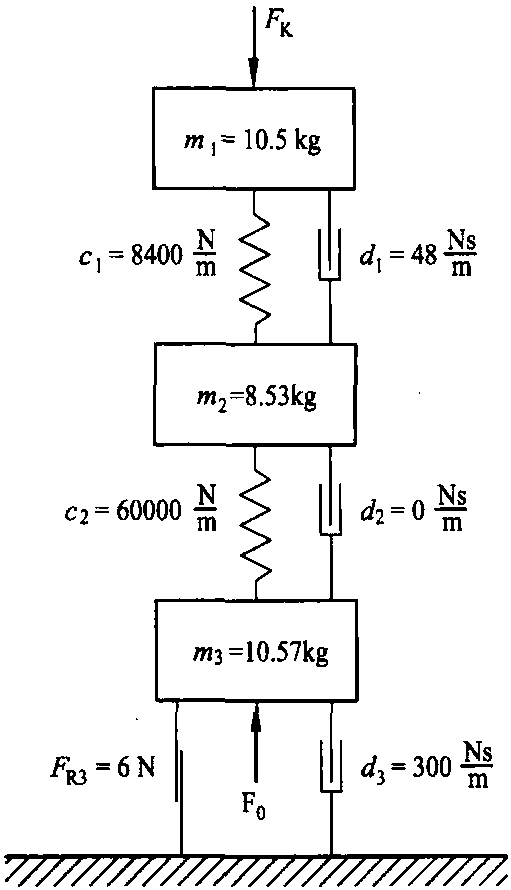
����Q���|(zh��)��������늹���ͨ�^(gu��)���ɺ;��_�����ϣ�����һ��(g��)��(ji��n)�ε�ģ�ͣ��@�Nģ�͵���ʎ�О����ͨ�^(gu��)һ��(g��)ϵ�y(t��ng)�Ķ����ַ��̱��_(d��)������ʽ�Ķ���ȡ�Q����Q�|(zh��)���Ĕ�(sh��)������ȡ�Q��ϵ�y(t��ng)���ɶȵĔ�(sh��)����ͨ����r�²�������(g��)��Q�|(zh��)�����������������|(zh��)��������늹����¿�ܡ��Ͽ�ܺͻ�����档�D9.8���������(g��)�|(zh��)��ģ��SBS 81�͵�(gu��)�F·��늹� [9.13]��
��Q�|(zh��)����(sh��)������ζ��ֻ���]�x����늹���ʎģʽ�����磬��늹��Ͽ�ܸ����ď�(f��)����ʎ�Լ��D9.8��ʾ�Ć�(g��)���Ի�����������@�Nģ���С�
�D9.9�������о�����(g��)���Ի������늹������õ�6�K�|(zh��)��ģ�͵���ʽ���@�������|(zh��)�����ֳ�λ�ڲ�֧ͬ���c(di��n)�ϵķ��|(zh��)���K���ػ���ě_�����ڸ��|(zh��)���K������(du��)�ڽ��|�c(di��n)��λ�óɾ��Էֲ���
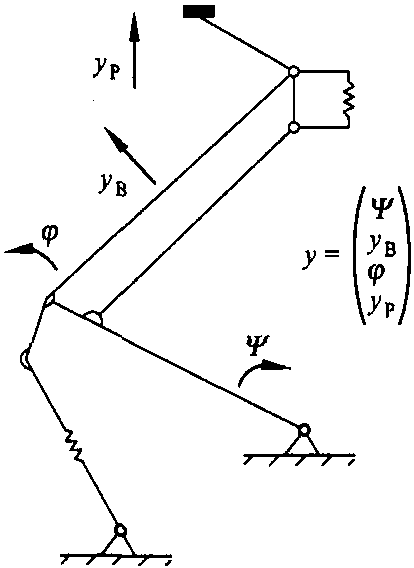
�D9.10 ��늹�ģ�͵ķ���
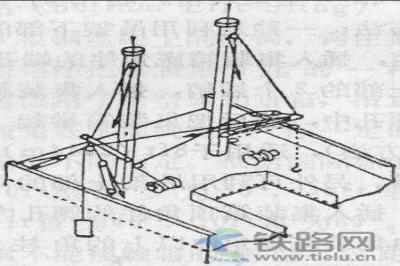
�څ����īI(xi��n) [9.14] �����_�l(f��)��ģ���nj��T���ڗl�λ���Ćα���늹����@�N��늹�ģ�����Ă�(g��)���ɶȣ���D9.10��ʾ�����H���]���M(j��n)�Зl�Ώ��ɵĴ�ֱ�\(y��n)��(d��ng)���С��Ͳ��B�ӵ��нǶȵ��\(y��n)��(d��ng)������߀���]���Ͽ�ܵď��������딵(sh��)�W(xu��)ģ�K�ą���(sh��)�Ǐ���늹������ĎκͲ��υ���(sh��)���ƌ�(d��o)����(l��i)�ġ����ҵ��Ǜ](m��i)��ͨ�õķ������ͣ���?y��n)��O(sh��)Ӌ(j��)��ÿ��(g��)С��׃�������磬���Æ�(g��)�ď��Ի��壬����Ҫ�µ��\(y��n)�㷨�t����������Ԫ���Ϳ��Եõ�����ľ��_�ȡ��څ����īI(xi��n) [9.15] �У�ICE����늹���ģ�;��Dz��õ�����Ԫ��������480������D(zhu��n)������Ҳ���������е��\(y��n)���^(gu��)�̡���ó��@�ӵĽY(ji��)Փ��Ӌ(j��)���и����˸߰��Ĵ��r(ji��)����
Ӌ(j��)��ģ�;��_�ȵĸ��M(j��n)�s��������ˣ������īI(xi��n) [9.15] �����߃H�����˺�(ji��n)�ε�����(g��)�|(zh��)��ģ�́�(l��i)��(y��u)����늹����O(sh��)Ӌ(j��)��
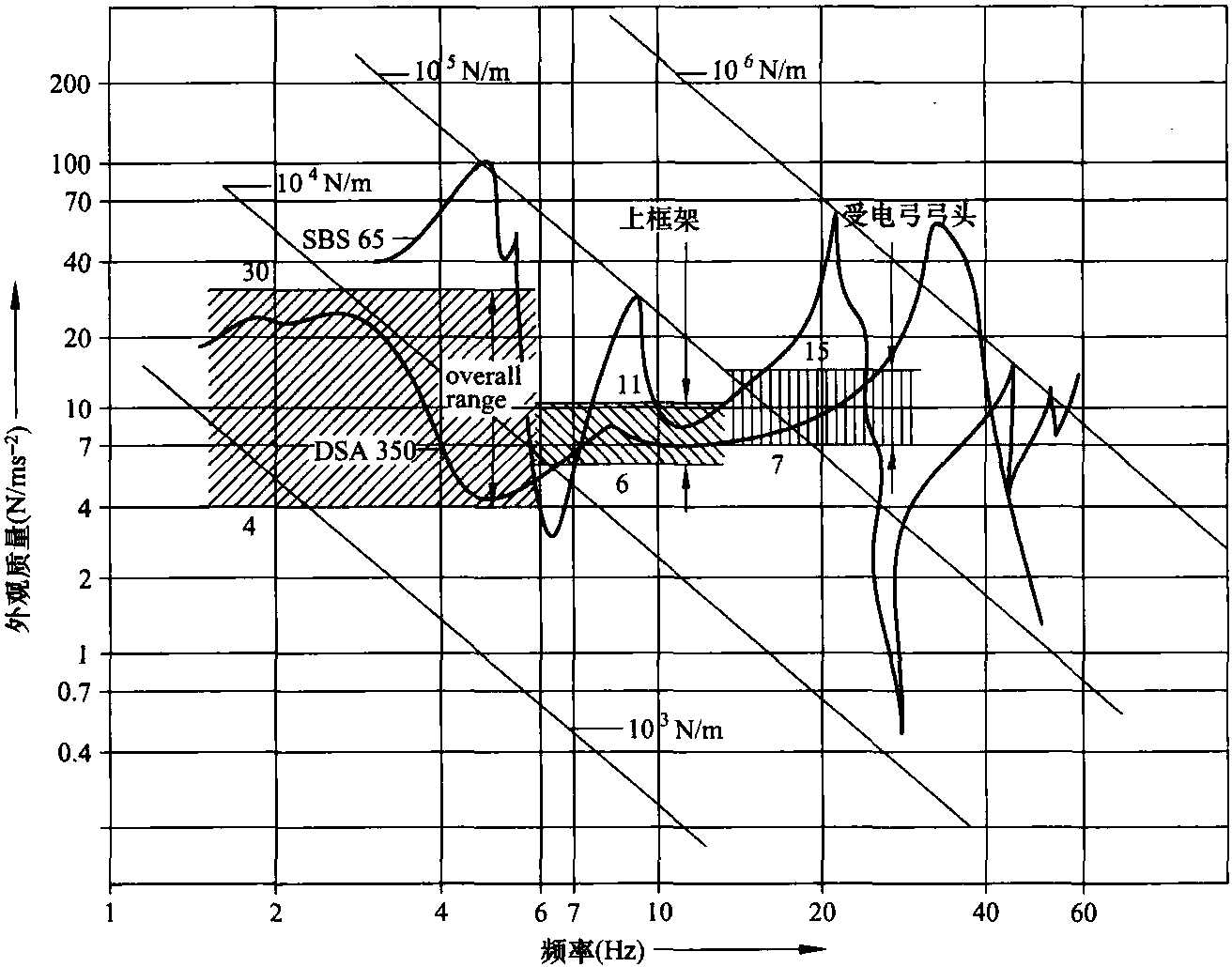
�D9.11 SBS 65�ͺ�DSA350����늹��O(sh��)Ӌ(j��)�Ą�(d��ng)�B(t��i)���^�|(zh��)��ģ�K
߀�����Üy(c��)�õ��c�l�����P(gu��n)�Ą�(d��ng)�B(t��i)�����|(zh��)���̈́�(d��ng)�B(t��i)ģ�M������늹� (��Ҋ�����īI(xi��n)[9.1] �ĈD9.11.)���@����Ӌ(j��)���пɌ���늹��ě_���ͷ���(y��ng)ҕ��������(y��ng)�l�ʕr(sh��)�Ϊ�(d��)����(y��ng)���ۼӡ��ڴ�ģ���У����ÆΪ�(d��)�l���\(y��n)�㷽���Ǿ��Ѓ�(y��u)��(sh��)�ġ���������ģ���У�ͨ�^(gu��)�C���������Դ_������(l��)ģ�͡����������Ĝy(c��)���⣬ͨ�^(gu��)���]�Ϊ�(d��)�l�ʂ�ݔ�T�ԣ�Ҳ���Դ_����(d��ng)�B(t��i)�����|(zh��)������λ����(y��ng)��
9.3.3 ���|�W(w��ng)ģ��
9.3.3.1 ����˼·
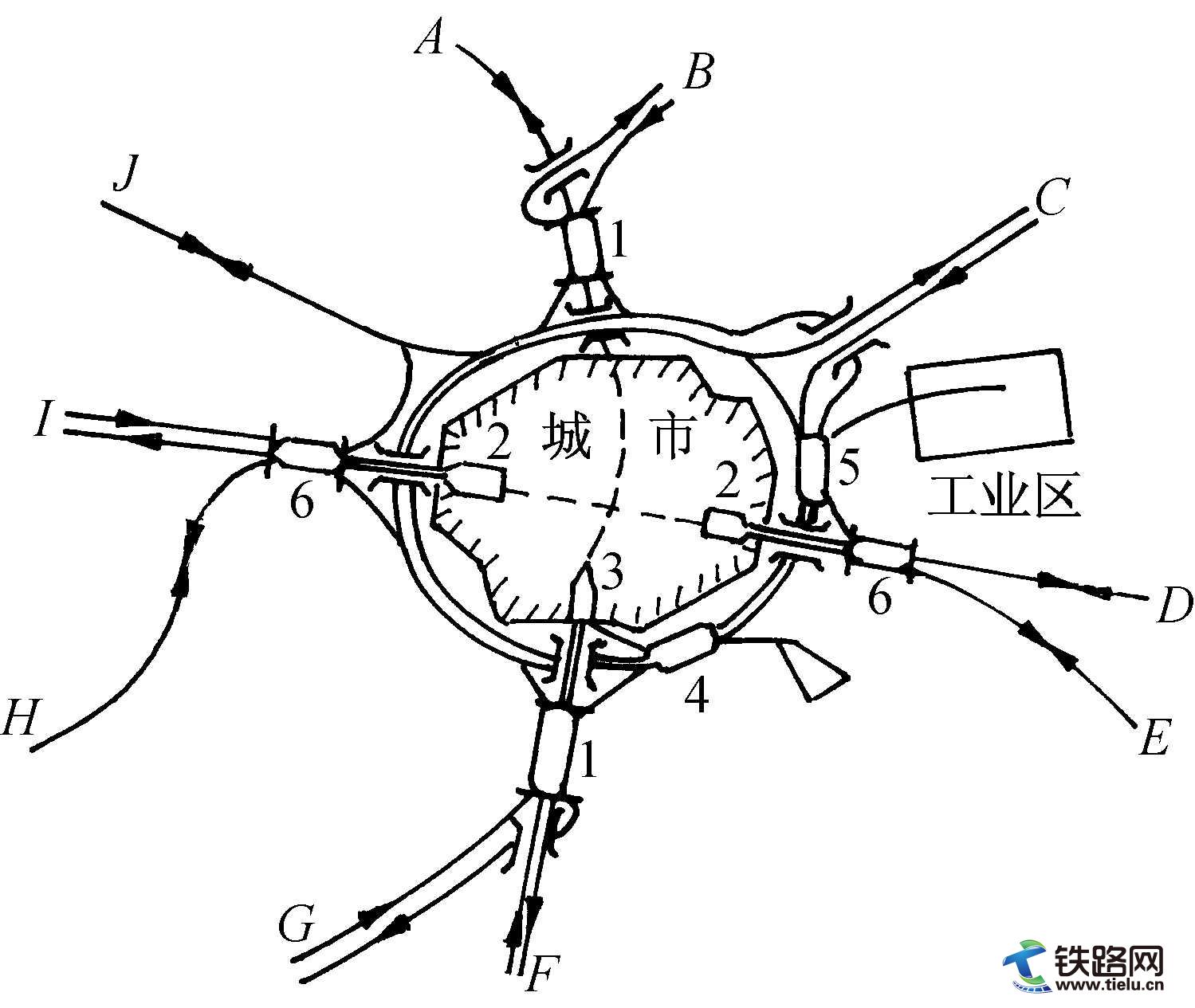
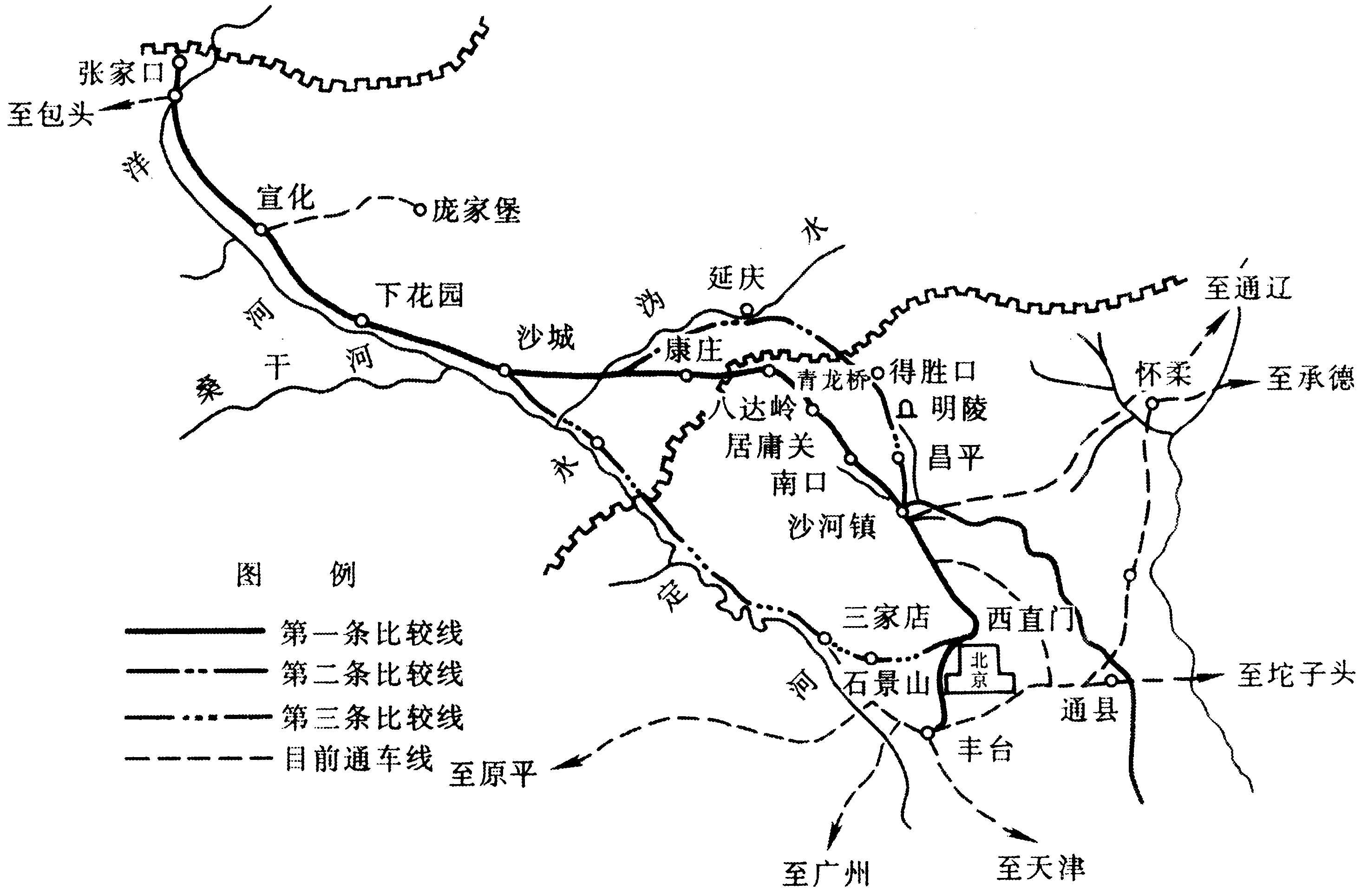
��؟(z��)�������W(w��ng)վ�����d��Ϣ����������վ�^�c(di��n)�����D(zhu��n)�d��(n��i)��֮ԭ��(chu��ng)�ԡ��挍(sh��)�ԡ������ԡ����r(sh��)�Ա�վ�����κα��C����Z��Ո(q��ng)�x�߃H�����������кˌ�(sh��)��