8.5.1 ��B
�ƄӘ��܉�ʹ�F·��������K�ؿ��^����������ʹ��݆���ĺ��в��܃��ո߶ȵ����ơ������ƄӘ��ϰ��b���|�W�r��횝M���F·��ˮ·�@�ɷN��ͨϵ�y��Ҫ��
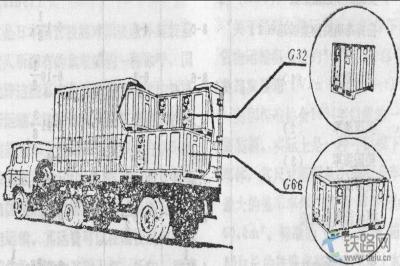
�ں��m��һЩ�ƄӘ��ϲ����b���|�W����܇�^��r��������ͨ�^�ƄӲ��֡����˾�C�]�м��r��������ô�����8.7.3���������ژ�ɶ˰��b�ļܿս��|܉��������늹���u������������λ�ã��^����ٌ�����֏͵�����λ�á����@���^������늹�̧���������߶ȱȽ��|�������߶��Ը�һ�c��
�@�N�OӋ��ʹ�ڵ��F·�\�е���늹�������܉���Ϸ�6.85m�����@�N��������܇վ����̖�O�丽�����t��������܇��ֹͣ�\���Dz��ɱ���ġ��˕r����횽o����܇�ṩ���g��������
��ʮ��ǰ���˾��Ѱ��b�����D���_�Ϙ�����������кܶ�鹤�̌W�İlչ��������̱�ʽ��ؕ�I���ڌ��@�N���M��늚⻯����֮ǰ����Ҫ����ij��d�����M�Џصיz�顣��Щ���ܳ��d���^�K�^֧����ؓ�ɣ�Ҳ���ܳ��d�鱣�C�����|������Ҫ�����Խ��|�W�ď��������ͨ����Ҫ���@�N���ϰ��b�ܿս��|܉���@�N�OӋ�Լ����ӌ�ʹ��܇��ͨ�^�ٶ��ܵ����ơ��C܇ͨ���ǽ��������^�����˾�C�������δ�����r�����|�W�����˾o������ƽ������ã�ͬ�rҲ���Խo�����O��Ć����ṩ�����������īI [8.6]�н�B�����¸�-��ʿ�D��AC 25kV늚⻯����r���b���ƄӘ��ϵļܿս��|܉ϵ�y��
8.5.2 ���|�W�OӋ
8.5.2.1 �_�Ϙ�
��ƽ�������_�Ϙ����|܉�İ��b�ṩ�����Ŀ��g�����OӋ�r����Ҫ�e�Pע�B�Ӵ���ƄӲ��ֵĽ��|�W (܉) �������̶����ֽ��|�W���^�Ʌ^�Ρ�
���ڰ��b�������� (Scherzer) ϵ�yƽ�����ص��_�Ϙ�ƽ�������������S�ķ������Ƶ��F·��·�����ԃȡ��@�N�����_��֮ǰ���䌧�������ܿս��|܉Ҫ�Ƴ�ƽ�����صĻ�ӷ�����
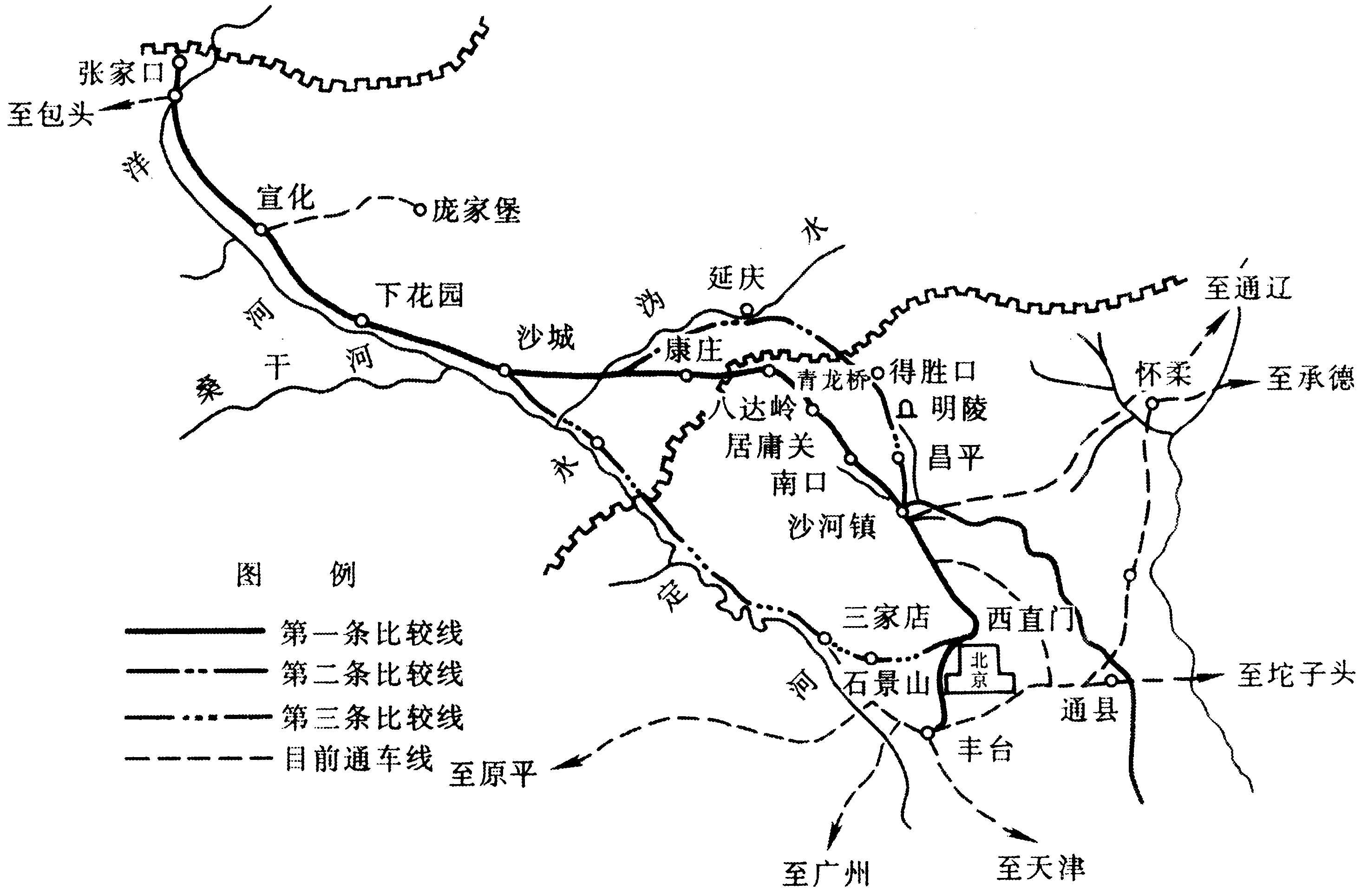
���F�е��_�Ϙ���̎λ�����e���£�
�M��Papenburg�ӵ��϶�;
�M��Emden���\��; 1980��늚⻯��Salzbergen-Emden-Norddeich��;
�M�纱�ؠ��ӣ��W�DZ��и���1980��늚⻯�IJ��R÷-�W�DZ���;
�M��Peene�ӣ�Anklam�и���1988��늚⻯�İ���-˹�������ɾ�;
�M��Ziegelgraben�ӣ�˹�������ɸ���1989��늚⻯��˹��������-Sabnitz����
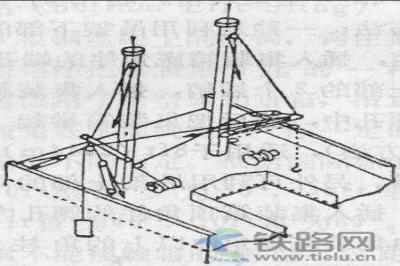
����Papenburg�_�Ϙ������L��ƽ������������|܉��֧�Ρ��@�������������˘����ķ������ء������c�ֶν^����������Ƶ�һ����������քe�c�Ӄɰ����^�����Խ��|�W�B�� (��D8.10)��
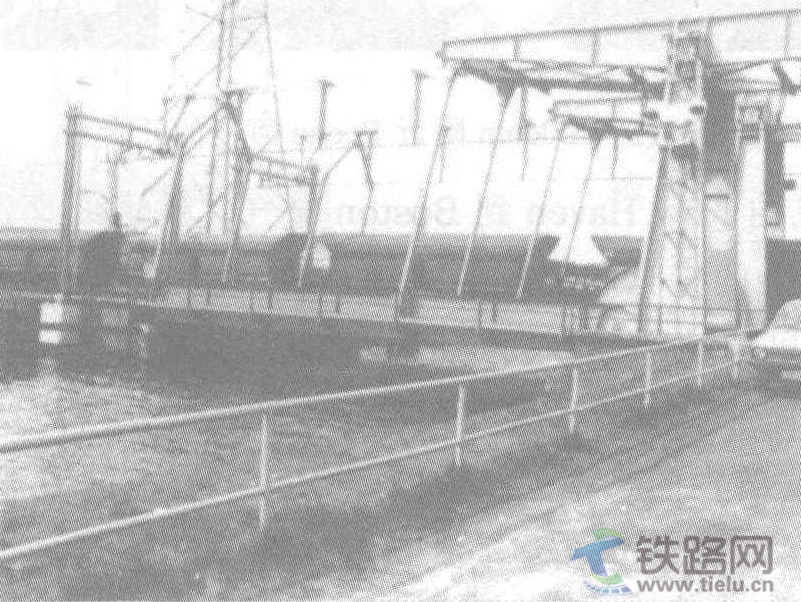
�D8.10 Papenburg�и������_�Ϙ�
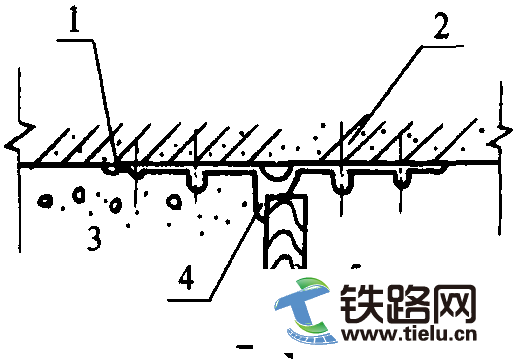
����ͽ��|܉���Ϸ���һ������֧�ܣ����ڻ���ĸ߶��{���͜p�����ӹ̶��ڻ�Ӳ����ϵĽ��|�����棬ʹ�������ژ����ď�����u�pС[8.7]��
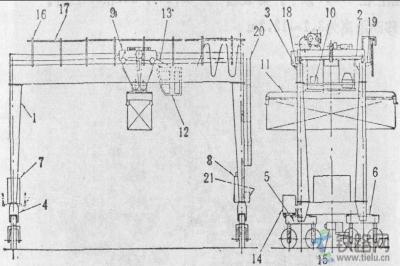
�ڲ��R÷-�W�DZ����ϵ��_�Ϙt���Ø�ɰ��ăɂ����T���M�н��|�Ғ�����^����֧�ν��|܉�Ŀ��_�ϲ��֡�ͬ�rҲ֧�Θ�����߅���ز�λ���������b�ú��B���b�á�ԓ���������c�ǘ�����ϵĽ��|�W���ֳ�����С���֡����|�W�ژ����gӲ�M��̎�������^�������Ï��ɏ����a���b����ƽ������̎�a�����^�����D���ЃɷN���D�ٶȣ����^���ٶȆ��ӕr�\�Еr�g�����^30s���ڵ��_�K�cǰ��ʩ�Ƅ��Ԝp�ل���[8.8]���o��Anklam�ęM��Peene�ӵ��_�Ϙ��˹�������ɸ����M��Ziegelgraben�ӵ��_�Ϙ������ƄӲ��ֺ��������υ^���b�мܿս��|܉���ڴ��_��֮ǰ�������b�������D���ʹ���|�W�x�_ƽ�����صĻ�ӷ��� (�D8.11)�����ڼܿս��|�W�ܘ�����Ӱ푮a�������ĄӑB���ԣ��Ҹ����\�Мyԇ�Y������܇�����r������\���ٶ���Ziegelgraben���ϲ��ܳ��^20 km/h����Peene���ϲ��ܳ��^10km/h����˙C܇ͨ���ǽ�������ͨ�^Peene��
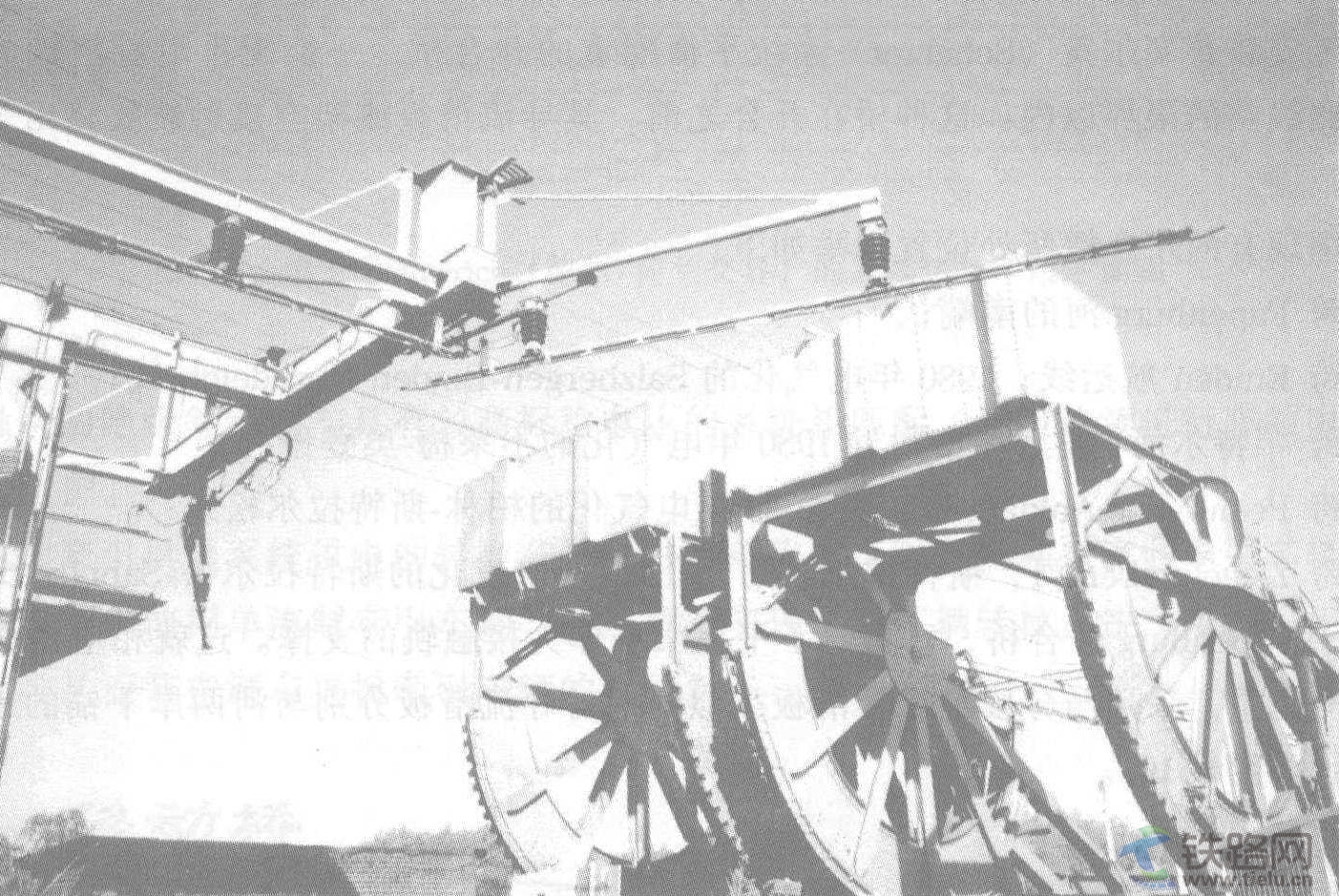
�D8.11 Anklam����Peene���ϵ��_�Ϙ�
1999��Amtrak���ɵ�New Haven��Boston늚⻯�F�������^Conneticut�ӣ�Niantic�Ӻ�Thanus�ӵ��_�Ϙ��ϵĽ��|�W�b�мܿս��|܉ (�D8.12)����܇ͨ�^�����r�ٿ��_145km[8.6]�������ژ�Ŀ��ƄӲ��̶ֺ�����֮�g���g��̎�M���B�ӣ������˿��Ƅ�ʽ���|�W�O�䡣������һ���T�͘��ܣ����ܿ���܉���Ƅӣ���܉�����b�ڃ�֧���g�������ϡ��Ƅ�ʽ���|�W�O�䰲�b���T�͘����ϲ��Ҳ���һ���Cе�b����ʹ���|�W�Ƴ���·��(�D8.12)������ϵ�y����i�b�����Ƅ�ʽ���|�W��ȫ�s�MǰҪ��ֹ�_�Ϙ��ȿ״��_��
8.5.2.2 ���_��
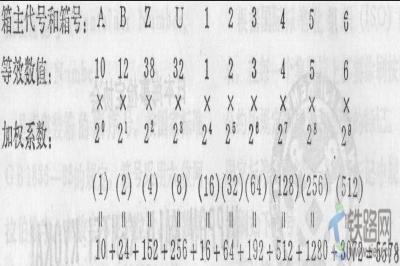
���_���@���̶��ژ��������ϵ��D�S���D90����_��ɂ�݆���ĺ��������b�ژ��ƄӲ��ֵĿɂ����D�Ӳ����i���N�Ļ�܉���c���b�ژ�̶����ּ��Ӄɰ��ļܿս��|�W�دB��
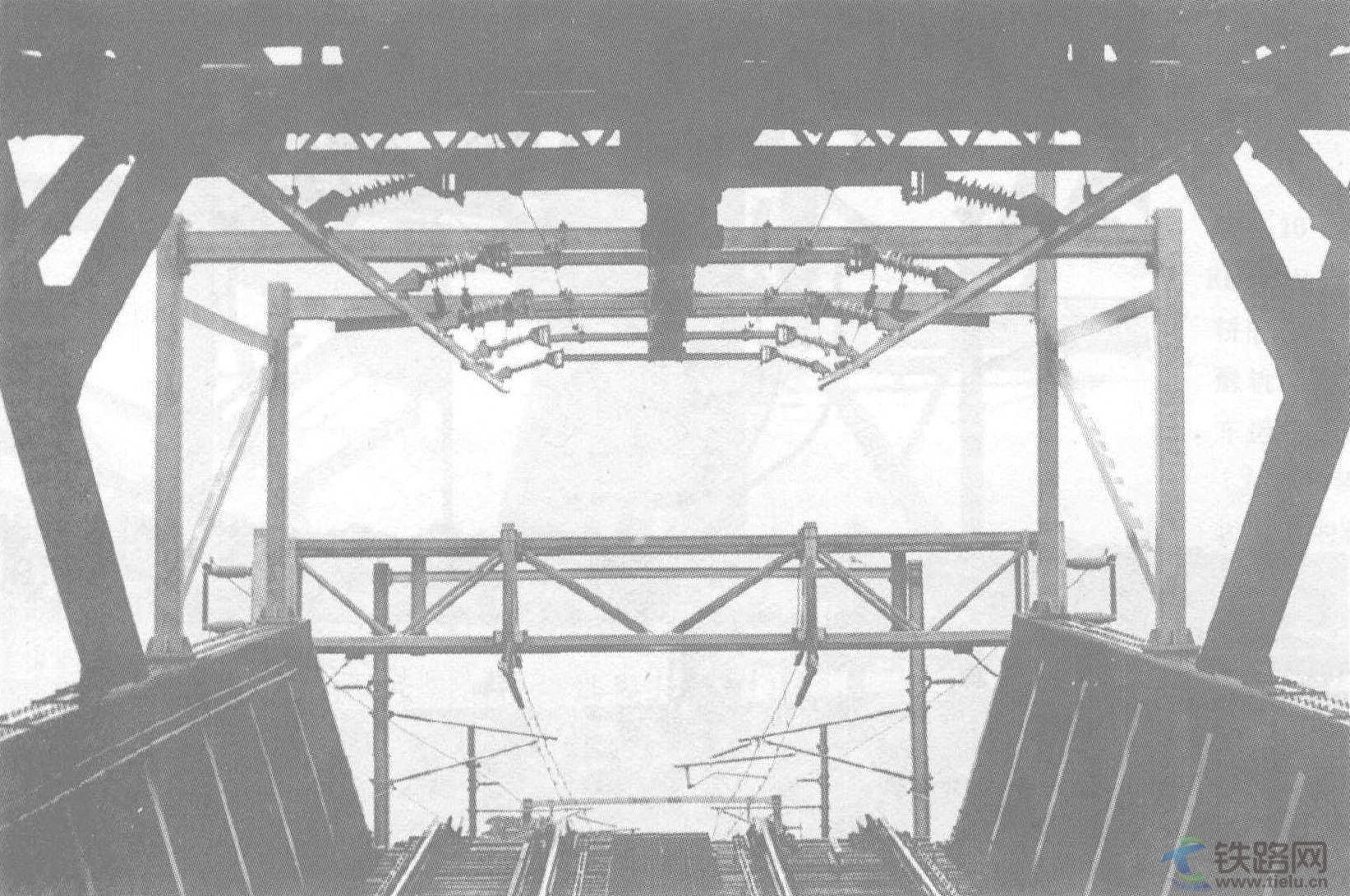
�D8.12 ��New Haven-Boston��·���b��Furrer+Frey��˾�ļܿս��|܉���_�Ϙ�
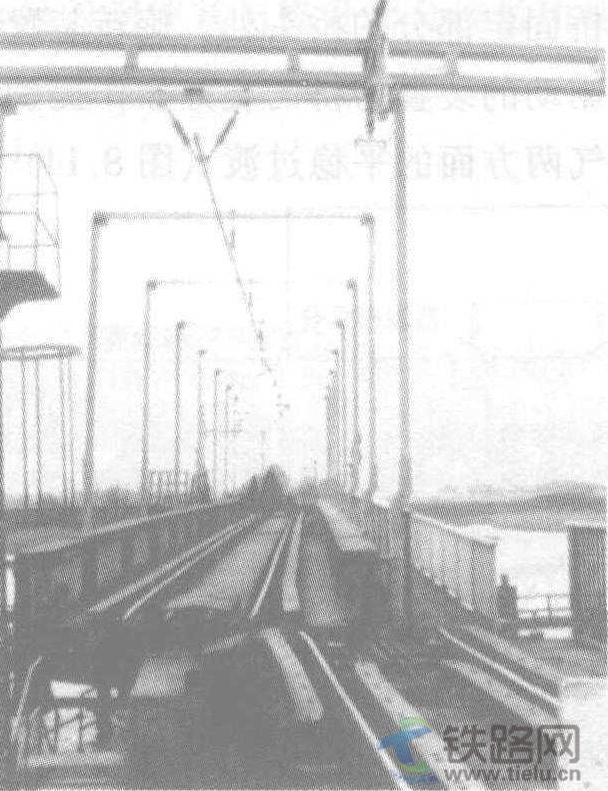
�D8.13 Elsfleth����Hunte���ϵ����_������̧��λ֮������_����
��؟�������Wվ�����d��Ϣ����������վ�^�c�����D�d����֮ԭ���ԡ��挍�ԡ������ԡ����r�Ա�վ�����κα��C����Z��Ո�x�߃H�����������кˌ���